stop bit
Смотреть что такое «stop bit» в других словарях:
stop bit — In asynchronous transmissions, a stop bit is transmitted to indicate the end of the current data word. Depending on the convention in use, one or two stop bits are used. See also data bits; parity; start bit … Dictionary of networking
stop bit — pabaigos bitas statusas T sritis informatika apibrėžtis Bitas, signalizuojantis apie ženklo arba ženklų grupės ↑asinchroninio perdavimo pabaigą ir esantis to ženklo (ženklų grupės) pabaigoje. Dažniausiai lygus vienetui. Jo signalo trukmė gali… … Enciklopedinis kompiuterijos žodynas
stop bit — When a modem sends a byte of data, it usually sends one or two bits after the data byte, before the next byte is sent. These bit(s) are called stop bits. They are always a binary 1. See also format … Dictionary of telecommunications
stop bit — In a serial transmission, the last bit that provides subsequent detection of the start bit of the next asynchronous transmission. The bit length may be 1, 1.42, or 2 mark bits … IT glossary of terms, acronyms and abbreviations
stop bit — n. Telecommunications (in asynchronous data transfers) one of a pattern of bits that indicate the end of a character or of the whole transmission … Useful english dictionary
Stop motion — (or frame by frame) animation is an animation technique to make a physically manipulated object appear to move on its own. The object is moved by small amounts between individually photographed frames, creating the illusion of movement when the… … Wikipedia
Stop-and-wait ARQ — is the simplest kind of automatic repeat request (ARQ) method. A stop and wait ARQ sender sends one frame at a time. After sending each frame, the sender doesn t send any further frames until it receives an ACK (acknowledgement) signal. After… … Wikipedia
Stop, Look, Listen (To Your Heart) — was a popular hit for Philly soul group The Stylistics in 1971 and was re released as a hit duet cover for Motown legends Marvin Gaye Diana Ross in 1973.The Stylistics versionThe Stylistics had just experienced seeing their first song, 1971 s You … Wikipedia
Stop the Cavalry — is a song written and performed by the musician, Jona Lewie.The song peaked at number three in the UK Singles Chart in December 1980, at one point only being kept from number one by two re issued songs by John Lennon, who had been murdered on 8… … Wikipedia
stop — Synonyms and related words: English horn, abandon, abjure, abort, afterthought, allophone, alveolar, anchorage, apico alveolar, apico dental, arrest, arrestation, articulation, aspiration, assimilation, awe, baffle, ban, bar, barricade, barrier,… … Moby Thesaurus
bit — bit1 W1S1 [bıt] adv, pron ▬▬▬▬▬▬▬ 1¦(only slightly)¦ 2¦(amount)¦ 3¦(quite a lot)¦ 4¦(time/distance)¦ 5 a bit of a something 6 not a bit/not one bit 7 every bit as important/bad/good etc 8 bit by bit 9 a/one bit at a time … Dictionary of contemporary English
Что такое UART. Коротко о методе приема-передачи.
Universal Asynchronous Receiver-Transmitter, UART — узел вычислительных устройств, предназначенный для организации связи с другими цифровыми устройствами. Преобразует передаваемые данные в последовательный вид так, чтобы было возможно передать их по цифровой линии другому аналогичному устройству. Метод преобразования хорошо стандартизован и широко применялся в компьютерной технике.
Представляет собой логическую схему, с одной стороны подключённую к шине вычислительного устройства, а с другой имеющую два или более выводов для внешнего соединения.
UART может представлять собой отдельную микросхему или являться частью большой интегральной схемы (например, микроконтроллера). Используется для передачи данных через последовательный порт компьютера, часто встраивается в микроконтроллеры.
Последовательный порт
serial port, COM-порт, communications port) — сленговое название интерфейса стандарта RS-232, которым массово оснащались персональные компьютеры. Порт называется «последовательным», так как информация через него передаётся по одному биту, последовательно бит за битом (в отличие от параллельного порта). Несмотря на то, что некоторые интерфейсы компьютера (например, Ethernet, FireWire и USB) тоже используют последовательный способ обмена информацией, название «последовательный порт» закрепилось за портом стандарта RS-232.
В настоящее время в IBM PC-совместимых компьютерах практически вытеснен интерфейсом USB.
Существуют стандарты на эмуляцию последовательного порта над USB и над Bluetooth (эта технология в значительной степени и проектировалась как «беспроводной последовательный порт»).
Существуют стандарты на эмуляцию последовательного порта над USB и над Bluetooth (эта технология в значительной степени и проектировалась как «беспроводной последовательный порт»).
Метод передачи и приёма
Передача данных в UART осуществляется по одному биту в равные промежутки времени. Этот временной промежуток определяется заданной скоростью UART и для конкретного соединения указывается в бодах (что в данном случае соответствует битам в секунду).
Существует общепринятый ряд стандартных скоростей: 300; 600; 1200; 2400; 4800; 9600; 19200; 38400; 57600; 115200; 230400; 460800; 921600 бод.
Скорость (, бод) и длительность бита (, секунд) связаны соотношением
Скорость в бодах иногда называют сленговым словом битрейт.
Помимо собственно информационного потока, UART автоматически вставляет в поток синхронизирующие метки, так называемые стартовый и стоповый биты. При приёме эти лишние биты удаляются из потока. Обычно стартовый и стоповый биты обрамляют один байт информации (8 бит), однако встречаются реализации UART, которые позволяют передавать по 5, 6, 7, 8 или 9 бит.
Обрамленные стартом и стопом биты являются минимальной посылкой. Некоторые реализации UART позволяют вставлять два стоповых бита при передаче для уменьшения вероятности рассинхронизации приёмника и передатчика при плотном трафике. Приёмник игнорирует второй стоповый бит, воспринимая его как короткую паузу на линии.
Принято соглашение, что пассивным (в отсутствие потока данных) состоянием входа и выхода UART является логическая 1.
Стартовый бит всегда логический 0, поэтому приёмник UART ждёт перепада из 1 в 0 и отсчитывает от него временной промежуток в половину длительности бита (середина передачи стартового бита). Если в этот момент на входе всё ещё 0, то запускается процесс приёма минимальной посылки. Для этого приёмник отсчитывает 9 битовых длительностей подряд (для 8-битных данных) и в каждый момент фиксирует состояние входа. Первые 8 значений являются принятыми данными, последнее значение проверочное (стоп-бит).
Значение стоп-бита всегда 1, если реально принятое значение иное, UART фиксирует ошибку.
Для формирования временных интервалов передающий и приёмный UART имеют источник точного времени (тактирования). Точность этого источника должна быть такой, чтобы сумма погрешностей (приёмника и передатчика) установки временного интервала от начала стартового импульса до середины стопового импульса не превышала половины (а лучше хотя бы четверти) битового интервала. Для 8-битной посылки 0,5/9,5 = 5 % (в реальности не более 3 %). Поскольку эта сумма ошибок приёмника и передатчика плюс возможные искажения сигнала в линии, то рекомендуемый допуск на точность тактирования UART — не более 1,5 %.
Поскольку синхронизирующие биты занимают часть битового потока, то результирующая пропускная способность UART не равна скорости соединения. Например, для 8-битных посылок формата 8-N-1 синхронизирующие биты занимают 20 % потока, что для физической скорости 115 200 бод даёт битовую скорость данных 92 160 бит/с или 11 520 байт/с.

Контроль чётности

Основная статья: Бит чётности
Многие реализации UART имеют возможность автоматически контролировать целостность данных методом контроля битовой чётности. Когда эта функция включена, последний бит данных в минимальной посылке («бит чётности») контролируется логикой UART и содержит информацию о чётности количества единичных бит в этой минимальной посылке. Различают контроль на четность (англ. Even parity), когда сумма количества единичных бит в посылке является четным числом, и контроль на нечетность (англ. Odd parity), когда эта сумма нечетна. При приеме такой посылки UART может автоматически контролировать бит четности и выставлять соответствующие признаки правильного или ошибочного приема.
Короткая запись параметров
Был выработан и прижился короткий способ записи параметров UART, таких, как
Выглядит как запись вида цифра-буква-цифра, где:
N (No parity) — без бита четности;
E (Even parity) — с битом проверки на четность,
O (Odd parity) — с битом проверки на нечетность;
Встречаются значения 1, 1.5 и 2 для длительности стоп-бита в 1, 1.5 и 2 битовых интервала соответственно.
Например, запись 8-N-1 обозначает, что UART настроен на 8 бит данных без бита четности и один стоповый бит. Для полноты параметров эту запись снабжают указанием.
Break
непрерывного нулевого состояния линии длительностью заведомо больше минимальной посылки, обычно 1,5 минимальных посылки (для 8N1 это 15 битовых интервалов). Некоторые коммуникационные протоколы используют это свойство, например, протокол LIN использует Break для обозначения нового кадра.
Управление потоком
Ранние устройства с UART могли быть настолько медлительными, что не успевали обрабатывать поток принимаемых данных.
Для решения этой проблемы модули UART иногда снабжались отдельными выходами и входами управления потоком. При заполнении входного буфера логика принимающего UART выставляла на соответствующем выходе запрещающий уровень, и передающий UART приостанавливал передачу.
Позже управление потоком возложили на коммуникационные протоколы (например, методом XOn/XOff), и надобность в отдельных линиях управления потоком постепенно исчезла.
Физический уровень
Логическая схема UART имеет входы-выходы с логическими уровнями, соответствующими полупроводниковой технологии схемы: КМОП, ТТЛ и т. д. Такой физический уровень может быть использован в пределах одного устройства, однако непригоден для коммутируемых длинных соединений по причине низкой защищённости от электрического разрушения и помехоустойчивости.
Для таких случаев были разработаны специальные физические уровни, такие, как токовая петля, RS-232, RS-485, LIN и тому подобные.
Специфической разновидностью физического уровня асинхронного интерфейса является физический уровень IrDA.
Существуют физические уровни UART для сложных сред. В некотором смысле стандартный компьютерный телефонный модем также можно назвать специфическим физическим уровнем асинхронного интерфейса. Существуют специальные микросхемы проводных модемов, сделанных специально как физический уровень асинхронного интерфейса (то есть протокольно прозрачные). Выпускается также радиоканальный физический уровень в виде модулей радиоприёмников и радиопередатчиков.
Протокол передачи данных UART
Универсальный асинхронный приёмопередатчик

Предисловие
Современная цифровая электроника — это всегда соединения между цепями (процессорами, контроллерами и т.д.) для создания симбиотической системы. Для того, чтобы отдельные микросхемы могли бы «понимать» друг друга, они должны разделять некий общий протокол связи. За годы существования цифровой техники было разработано множество протоколов. В целом, их все можно разделить на две большие группы — параллельные и последовательные.
Параллельный или последовательный?
Параллельные интерфейсы передают одновременно (параллельно) несколько бит информации (отсюда, собственно и их название). Для передачи данных такие интерфейсы требуют наличия шин, состоящих из 8, 16 или более проводников.
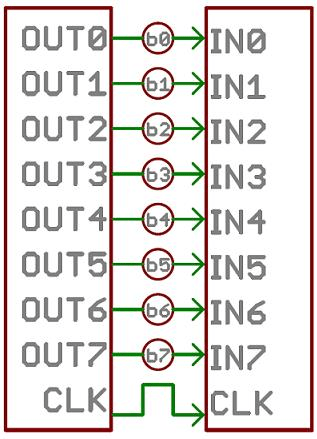
В противоположность параллельным, последовательные интерфейсы передают по одному биту за раз. Теоретически такой интерфейс может работать на одном единственном проводе. На практике используется до четырех.
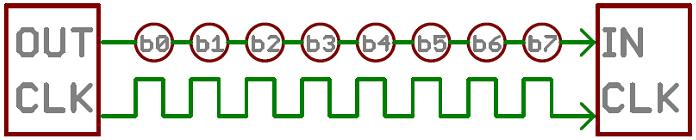
Пример последовательного интерфейса, передающего один бит в течение каждого тактового импульса CLK. Требуется всего 2 провода.
Эти два интерфейса можно сравнить с потоком автомобилей. Параллельный интерфейс — это широкое шоссе с количеством полос движения более восьми, а последовательный интерфейс больше поход на двухполосную сельскую дорогу. Мега — Шоссе, потенциально, имеет бОльшую пропускную способность, но очень дорого с точки зрения строительства. Сельская дорога просто выполняет свою функцию и стоит во много раз дешевле многополосного мега-шоссе.
Вне всякого сомнения, параллельные интерфейсы имеют свои преимущества. Это прямота, быстрота, и легкость реализации. Но мы получаем это за счет большого количества проводов (линий) передачи данных. Если вам когда либо приходилось разрабатывать программы для микроконтроллеров (например в среде Arduino), вы наверняка знаете, насколько драгоценными могут быть линии ввода/вывода. Поэтому мы часто останавливаем свой выбор именно на последовательной связи, жертвуя скоростью, но экономя драгоценные порты микроконтроллера.
Асинхронный последовательный интерфейс
За время существования цифровой техники были созданы десятки последовательных протоколов. USB (универсальная Последовательная Шина) и Ethernet — это пример двух наиболее популярных сейчас последовательных протоколов. Другие очень популярные последовательные интерфейсы — это SPI, I2C и последовательный интерфейс, о котором пойдет речь в этой статье. Каждый их этих интерфейсов можно отнести к одной из двух подгрупп — Асинхронные и Синхронные.
Синхронный протокол всегда включает линию тактового сигнала. Это обеспечивает более простую (и зачастую более быструю) передачу данных, но требует как минимум один дополнительный провод. Пример синхронных интерфейсов — это SPI и I2C.
Асинхронный последовательный интерфейс, о котором здесь идет речь, широко используется во встраиваемых системах. Если вы хотите добавить в свой проект модуль GPS, Bluetooth, XBee, последовательные ЖК-дисплеи или многие другие внешние устройства, вам, вероятно, придется столкнуться с одним из последовательных интерфейсов.
Правила последовательного интерфейса.
Асинхронный последовательный протокол имеет ряд встроенных правил — механизмов, которые помогают обеспечить надежную и безошибочную передачу данных. Это те механизмы, которые позволяют передавать данные без использования внешнего тактового сигнала:
Благодаря сочетанию этих правил — параметров, протокол очень гибкий. Для успешной связи нужно убедиться, что оба устройства на шине настроены на использование одинаковых правил.
Данный параметр определяет скорость передачи данных по последовательной линии. Обычно это выражается в единицах бит в секунду (бит / с или БОД). Если вы инвертируете этот параметр, выраженный в бодах, то получите время, которое требуется для передачи одного бита. Это значение определяет, как долго передатчик держит последовательную линию в высоком / низком состоянии или в какой период принимающее устройство производит выборку своей линии.
Скорость передачи может быть практически любой в пределах разумного. Единственное требование заключается в том, что оба устройства работали с одинаковой скоростью. Одна из наиболее распространенных скоростей передачи, особенно для простых применений, где скорость не критична, составляет 9600 бит / с. Другие «стандартные» скорости — 1200, 2400, 4800, 19200, 38400, 57600 и 115200.
Кадры данных
Каждый блок данных (обычно это байт) фактически отправляется в пакете или кадре битов. Кадры создаются путем добавления бит синхронизации и бит четности к битам данным.

Один кадр (Frame) последовательных данны. (Size = размер)
Давайте рассмотрим каждую часть кадра более подробно
Блок Данных ( Data chunk )
Самая важная часть каждого пакета — это блок данных, так как именно этот блок несет полезную информацию. Мы намеренно называем этот блок «куском» данных (chunk), поскольку его размер конкретно не указан. Количество данных в каждом пакете может быть установлено любым — от 5 до 9 бит. Разумеется, стандартный размер данных — это наш с вами основной 8-разрядный байт, но другие его размеры также в ходу. 7-битный блок данных может быть более эффективным, чем 8-битный, особенно если вы просто переносите 7-битные символы ASCII (текст).
После согласования длины символа оба устройства на последовательной шине также должны согласовать достоверность своих данных. Являются ли данные наиболее старшим битом (msb) наименьшим, или наоборот? Если не указано иное, обычно мы предполагаем, что сначала передается младший бит (lsb)
Биты синхронизации
Биты синхронизации представляют собой два или три специальных бита, передаваемых с каждым фрагментом данных. Это стартовый и стоповый биты. Эти биты отмечают начало и конец пакета. Всегда есть только один стартовый бит, но количество стоповых бит настраивается отдельно. Может быть один или два стоп-бита (чаще всего используется один).
Старт-бит всегда определяется линией данных по его спаду (переходу от 1 в 0), в то время как стоп биты определяются линией по фронту, то есть по переходу из 0 в 1.
Биты четности
Четность — это форма очень простой, низкоуровневой проверки ошибок. Может быть два варианта такой проверки: нечетный или четный. Чтобы создать бит четности, все 5-9 бит блока данных складываются, а четность суммы определяет, установлен бит четности или нет. Например, представим себе что у нас проверка установлена в режим четности. Байт данных в двоичном представлении равен 01011101. Видим, что в байте нечетное количество единиц (пять единиц). В этом случае бит проверки четности будет установлен в 1. Если мы настроим режим проверки на на нечетность, то соответственно, бит проверки будет установлен в 0.
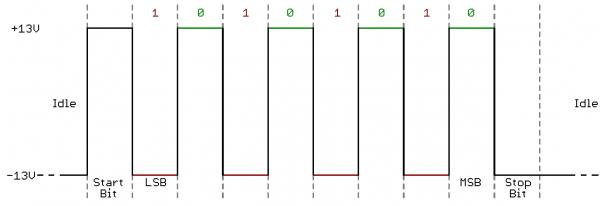
Пример настройки протокола: 9600 8N1
9600 8N1 — 9600 бод, 8 бит данных, без контроля четности и 1 стоповый бит — это одна из наиболее часто используемых настроек последовательного протокола. Итак, как выглядит пакет или два из 9600 8N1 данных? Приведем пример:

Фактически для каждого байта передаваемых данных отправляются 10 бит: начальный бит, 8 бит данных и стоповый бит. Таким образом, при 9600 бит / с мы фактически отправляем 9600 бит в секунду или 960 (9600/10) байтов в секунду.
Теперь, когда вы знаете, как создавать последовательные пакеты, мы можем перейти к разделу аппаратного обеспечения.
Мы увидим, как всё это будет реализовано на уровне сигнала.
Последовательная шина состоит всего из двух проводов: один для отправки данных и другой — для приема. Таким образом, последовательные устройства должны иметь два последовательных контакта: приемник, ( RX ) и передатчик ( TX ).

Последовательный интерфейс, в котором оба устройства могут отправлять и принимать данные, называется дуплексным или полудуплексным. Дуплексный означает, что оба устройства могут отправлять и принимать одновременно. Полудуплексная связь означает, что последовательные устройства должны по очереди отправлять и принимать данные.
Реализация в железе
Итак, мы с вами рассмотрели асинхронный последовательный протокол с концептуальной стороны. Мы знаем, какие провода нам нужны. Но как осуществляется последовательная связь на уровне сигнала? На самом деле, по-разному. Существуют всевозможные стандарты. Давайте рассмотрим пару наиболее популярных аппаратных реализаций последовательного интерфейса: логического уровня (TTL) и RS-232.
Когда микроконтроллеры и другие низкоуровневые ИС взаимодействуют между собой по последовательному протоколу, они обычно делают это на уровне TTL (транзисторно- транзисторная логика). Последовательные сигналы TTL живут между диапазоном напряжения питания микроконтроллера — обычно от 0 до 3,3 В или 5 В. Сигнал на уровне VCC (3,3 В, 5 В и т. д.) указывает либо о простое, либо это — бит 1 данных, либо стоп-бит. Сигнал 0 В (GND) представляет собой либо стартовый бит, либо бит данных значения 0.

Во встроенных схемах (внутри одного устройства) намного проще использовать последовательные сигналы формата TTL. Но в случае с длинными линиями передачи данных низкие уровни TTL намного более восприимчивы к потерям и помехам. RS-232 или более сложные стандарты, такие как RS-485, лучше подходят для последовательных передач на большие расстояния.
Когда вы соединяете два последовательных устройства вместе, важно убедиться, что их сигнальные напряжения совпадают. Вы не можете напрямую соединять последовательное устройство TTL с шиной RS-232. Вам придется конвертировать их уровни для взаимной совместимости.
UART
Универсальный асинхронный приемник / передатчик (UART) представляет собой блок схем, ответственный за реализацию последовательной связи. По сути, UART выступает в качестве посредника между параллельными и последовательными интерфейсами. На одном конце UART есть шина из восьми (или около того) линий данных (плюс некоторые управляющие контакты), с другой — два последовательных провода — RX и TX.
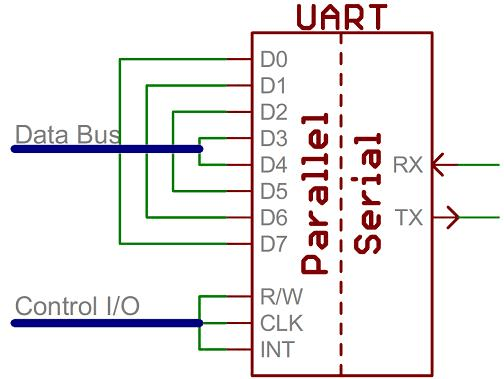
Упрощенная схема интерфейса UART
Интерфейсы UART существуют в виде отдельных микросхем, но чаще всего они встроены в микроконтроллеры. Чтобы узнать, есть ли у вашего МК протокол UART, вам придется почитать даташит на этот контроллер. У некоторых нет ни одного, у некоторых есть, у некоторых их несколько. Например, Arduino Uno, основанный на старом добром ATmega328, имеет только один UART, в то время как Arduino Mega — построенный на ATmega2560 — имеет целых четыре UART.
R и T в терминологии UART несут ответственность за отправку и получение последовательных данных. На стороне передачи UART должен создать пакет данных — добавление битов синхронизации и четности — и отправить этот пакет по линии TX в соответствии с установленной скоростью передачи. На стороне приема UART должен проверять линию RX со скоростью, соответствующей ожидаемой скорости передачи в бодах, выбирать биты синхронизации и выделять данные.
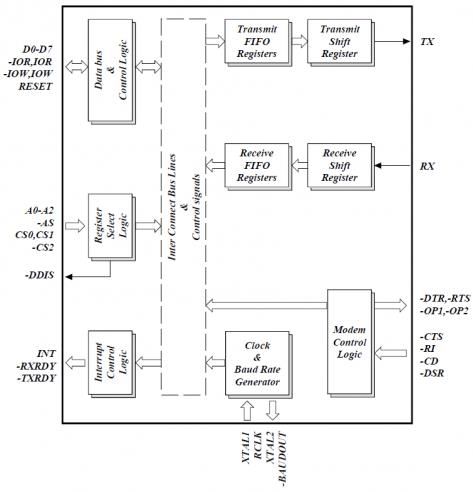
Внутренняя блок-схема UART (любезно предоставлена Exar ST16C550)
Более продвинутые UART могут передавать полученные данные в буфер, где они будут оставаться до тех пор, пока микроконтроллер не сможет их получить и обработать. Обычно UART выдают буферизованные данные по принципу «первым вошел — первым вышел» (FIFO). Буферы могут быть как маленькими, так и большими, более тысячи байтов.
Программный UART
Если микроконтроллер не имеет встроенного аппаратного UART (или их количество недостаточно для приложения), последовательный интерфейс может быть реализован программно. Это тот подход, который используется в библиотеках Arduino, таких, как SoftwareSerial.Точность работы программно реализуемого UART меньше чем аппаратного, но в крайнем случае можно использовать и такой вариант.
Общие вопросы
Это все, что связано с последовательной связью. Я хотел бы обратить ваше внимание на распространенные ошибки, которые допускают инженеры любого уровня опыта. Это досадные ошибки вроде RX-to-TX, TX-to-RX. Удивительно, но это ошибка, которую я допускал несколько раз.
Несоответствие скорости передачи
Скорость передачи данных — это вроде языка в последовательной связи. Если два устройства не «говорят» с одинаковой скоростью, данные могут быть либо неверно истолкованы, либо полностью пропущены. Если все принимающее устройство «видит» на своей линии приема гору мусора, проверьте соответствие скоростей передачи и приема.
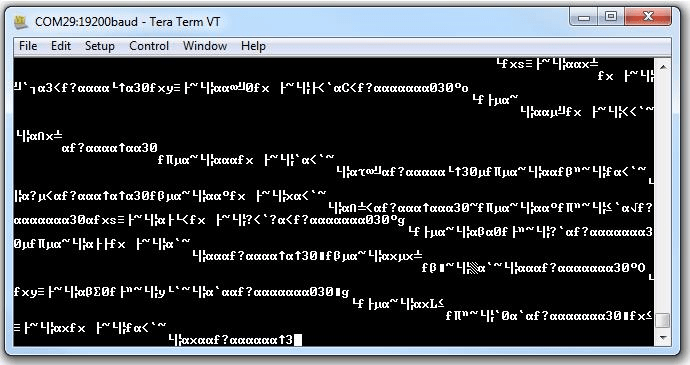
Данные передавались со скоростью 9600 бит/с, но получены со скоростью 19200 бит/с. В итоге — гора мусора.
Объединение шин
Последовательная связь предназначена для того, чтобы два устройства могли обмениваться данными по одной последовательной шине. Если несколько устройств пытаются передать на одной и той же последовательной линии, вы можете столкнуться с конкуренцией на шинах.
Например, если вы подключаете GPS-модуль своего Arduino, вы можете просто подключить TX-линию этого модуля к линии RX Arduino. Но этот вывод Arduino RX уже подключен к контакту TX преобразователя USB-to-serial, который используется всякий раз, когда вы программируете Arduino или используете Serial Monitor. Это порождает возможность возникновения ситуации, когда и модуль GPS, и чип FTDI попытаются передать данные на одной и той же шине одновременно.
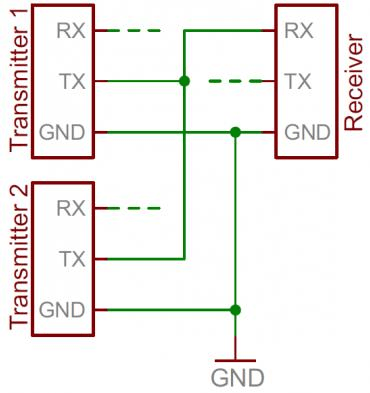
Два передатчика пытаются отправить данные в одну и ту же шину. Ситуация конкуренции на шине
В общем, нужно придерживаться правила — одна последовательная шина, два последовательных устройства!