Принцип работы энкодера, как он устроен и как работает
Что это такое и где применяется
Энкодер (ДУП) – это специальное устройство, необходимое для точного измерения интересующих параметров движения детали цифровым способом (угол поворота/направление/скорость и позиция), к примеру, редуктора или вала на электродвигателе. Стоит отметить, что данное устройство может носить название преобразователя угловых помещений.
Своё применение энкодер нашёл в разных системах точных перемещений, в промышленности (станкостроительные заводы); в роботостроении, измерительных устройствах, для которых важен точный учёт измерений вращения, поворота, наклона и угла. Также их применяют в таких сферах как: автомобилестроение и компьютерная техника.
Принцип работы энкодера заключается в его передаче сигнала на вращающийся объект. При этом он позволяет увидеть такие данные как: угол поворота/направление/скорость и позиция.
Устройство и виды энкодеров
Как вы уже узнали, энкодер – это поворотный датчик. Самый простой датчик оснащён ручкой, способной совершать поворот, как по стрелке часов, так и против неё. От поворотного угла и направления зависит выдаваемый цифровой сигнал, который информирует либо о том, какое положение приняла ручка, либо её стороне поворота. Обычно у таких энкодеров ручка применяется ещё в виде кнопки.
Датчики поворотного угла подразделяют по следующим критериям:
Инкрементальный энкодер принцип работы
Имея более простую конструкцию, преобразователь формирует импульсы, благодаря которым устройство приёма информации определяет нынешнее положение объекта, подсчитывая счётчиком число импульсов. Сразу после приведения данного вида ДУПа в действие положение интересующего объекта (вала) неизвестно. Для подключения системы отсчёта непосредственно к отсчётному началу такие датчики оснащены нулевой меткой. Через них валу необходимо пройти после соответствующего включения устройства.
Из недостатков данного вида датчиков можно выделить то, что определить пропуск импульсов от преобразователя не представляется возможным. Это соответственно является причиной накопления ошибки при выявлении поворотного угла объекта (пока он не пройдёт нуль-метку). Для выявления направления поворота используется пара измерительных каналов – косинусный и синусный. В них одинаковые импульсные последовательности перемещены ровно на 90 градусов относительно обоих каналов.
Абсолютный энкодер устройство
У этого типа ДУПа его поворотный круг поделён на определённые пронумерованные сектора, обычно идентичного размера. Во время работы он выдаёт конкретный секторный номер, в котором он непосредственно и находится. Именно поэтому данное устройство называют абсолютным. Благодаря его устройству можно легко определить угол/положение/направление энкодера относительно начального (нулевого) сектора.
Помимо этого абсолютный датчик угла не требует присоединения систем отсчёта к какому-нибудь нулевому значению. В нём используется специальный код Грея, позволяющий не допустить ошибки при работе. Из недостатков можно выделить только то, что микроконтроллер будет вынужден постоянно его переводить в двоичный код, чтобы выяснить положение ДУПа.
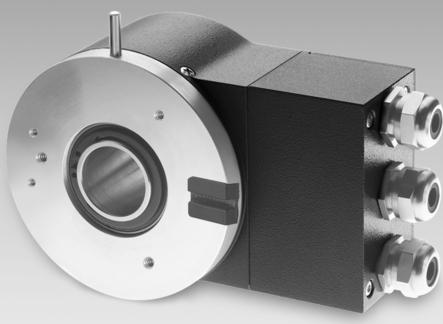
Оптические ДУПы
Они отличаются наличием диска из стекла с оптическим растром, закреплённого на валу. Во время вращения вала создаётся поток света, который впоследствии принимается фотодатчиком.
Абсолютный оптический датчик – это ДУП, в котором каждое положение вала имеет свой выходной цифровой код. Этот код является одним из основных параметров устройства. Данный датчик, как и инкрементный, вычисляет и закрепляет параметр движения оптического диска.
Магнитные
Магнитный энкодер регистрирует передвижение движущегося магнитного элемента, а именно его магнитных полюсов рядом с чувствительным элементом, переводя полученные данные в определённый сигнал.
Механические
Отличаются наличием диска, материал которого представлен диэлектриком, с нанесённым на него выпуклым или непрозрачным участком. В механической системе абсолютный угол считывается с помощью линейки переключателей/контактов, а в оптической с помощью линейки оптронов. Выходной сигнал представлен кодом Грея, позволяющим убрать неоднозначность интерпретируемого сигнала.
Недостаток механического энкодера представляет собой дребезжание контактов, зачастую приводящий к неверному подсчёту и выявлению направления движения. Оптический и магнитный энкодеры не имеют этой особенности.
Параметры
Первоначальный параметр любого ДУПа представлен числом импульсов, получаемых за совершение одного оборота (разрешение/разрядность). Зачастую этот параметр равен 1024 за один оборот.
Из других критериев можно выделить:
Установка
Энкодер устанавливают соответственно на валу, информацию которого необходимо получить. Для установки требуется специальная переходная муфта, с помощью которой можно скомпенсировать возможную разность в размерах с валом энкодера. Важно! Корпус ДУПа должен быть крепко зафиксирован.
Для монтажных работ преобразователя с полым валом необходим другой способ. В таком варианте вал, информацию которого нужно получить, включён внутрь ДУПа и закрепляется в пустой втулке. Стоит учитывать, что у такого типа ДУП корпус не закрепляется.
Подключение
В самом лёгком варианте, если имеется возможность, выход преобразователя подключается к входу счётчика и программируется на параметр скорости.
Однако обычно преобразователь используют вместе с контроллером. К нему присоединяют интересующие выходы. Далее программа определяет положение/скорость/ускорение объекта. К примеру, устройство установлено на электродвигательном валу, перемещающем один элемент в сторону другого. После вычислений на устройстве вывода виден зазор между элементами, при достижении которого движение элементов останавливается, для обеспечения их сохранности.
Энкодер: что это такое, принцип работы, виды, для чего используется
Энкодер – это устройство для замеров тех или иных параметров цифровыми методами. К таковым могут относиться параметры передвижения деталей, углы их поворота, направление перемещения, скорость. Энкодер еще называют преобразователем угловых помещений.

Среди прочих важных конструктивных параметров выделяют:
Разновидности энкодеров
Любой энкодер представляет собой поворотный датчик. Самая простая его конструкция оснащается ручкой, которая может осуществлять повороты в разные стороны. От того, на сколько углов было совершено вращение, а также от направления вращения и будет зависеть цифровой сигнал на выходе.
Эти устройства принято разделять по таким критериям:
Энкодер инкрементного типа образует импульсы, которые определяются устройством считывания информации. Это и позволяет им определять положение того или иного объекта, а также подсчитывать количество импульсов.
Когда устройство приводится в работу, настоящее положение целевого объекта еще неизвестно. Для того чтобы подключилась система отсчета, используется нулевая отметка. Через нее вал проходит после включения энкодера.

При всех своих плюсах, данная разновидность устройств имеет некоторые недостатки. Например, то, что определение пропуска импульсов от преобразовательного устройства невозможно. Порой это способствует накоплению ошибок во время определения угла поворота. Чтобы избежать этого, применяют пару каналов измерения – синусные и косинусные.
Абсолютные энкодеры имеют специальный поворотный круг, который разделен на специальные секторы, как правило, имеющие одинаковые размеры и пронумерованные. Когда устройство включается в работу, выдается тот или иной номер сектора, где оно находится в данный момент. Отсюда и название – абсолютный энкодер. Данная конструктивная особенность позволяет быстро определить как угол, так и положение, а также направление вращения. Данные параметры определяются относительно нулевого сектора диска.

Абсолютные угловые датчики не требуют соединения системы отсчета с нулевым значением. Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.
Можно назвать лишь один недостаток данного типа датчика – это необходимость постоянного перевода в двоичные коды для определения положения. Оптический тип датчика конструктивно предусматривает наличие оптического растрового диска, который закрепляется на вал. Когда тот вращается, формируется световой поток, затем он воспринимается фотоприемником.
Оптические энкодеры абсолютного типа – это устройства, в которых каждая позиция вала обладает своим выходным цифровым кодом, являющимся главным показателем для устройства. Согласно ему и производятся вычисления, а также закрепление параметров передвижения диска.
Существует также магнитная разновидность энкодеров, которые регистрируют движение подвижных магнитных элементов. Затем данные переводятся в определенные сигналы, понятные системе.

Наконец, механические энкодеры. Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.

В качестве минусов данных типов энкодеров можно назвать разбалтывание контактов со временем. Это будет приводить к тому, что сигнал подвергнется искажению, выдавая не всегда достоверные подсчеты. Датчики оптических и магнитных моделей лишены данного недостатка.
Кроме того, различают одно- и многооборотные энкодеры. Однооборотным является датчик, выдающий показания по абсолютному значению в рамках вращения на 360 градусов, то есть внутри одного оборота. После того, как оборот будет совершен, код начинает считываться заново. Обычно датчики таких моделей находят свое применение в антенных системах, коленчатых прессах и т.п.
Многооборотные устройства, как несложно догадаться, рассчитаны на счет кодов в течение определенного числа оборотов. К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Где может быть использовано устройство
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
Преимущества и недостатки энкодеров.
К плюсам данных устройств можно отнести:
Существуют и определенные недостатки:
Стоит заметить, что эти и прочие недостатки с лихвой перекрываются удобством и универсальностью энкодеров.
— персональную информацию, которую Пользователь сознательно раскрыл Администрации Сайта в целях пользования ресурсами Сайта;
— техническую информацию, автоматически собираемую программным обеспечением Сайта во время его посещения.
Сравнение различных типов энкодеров

Энкодеры широко используются в промышленности для управления движением, контроля положения и скорости электродвигателей. Полученная информация может использоваться электроникой управления движением для определения скорости вращения электродвигателя и рабочего органа, их местоположения, а также для выполнения корректировок в случае отклонения от заданных параметров.
Вот сравнение шести наиболее часто используемых типов энкодеров.
Оптические энкодеры
Оптические энкодеры используют наличие или отсутствие света для определения положения вала. Говоря простым языком — есть диск с прорезями в нем, который вращается вместе с валом. Когда диск проходит между источником света и фотоэлектрическим датчиком, отверстия регулярно пропускают свет к датчику или блокируют свет. Самые точные оптические энкодеры используют диски из стекла с черными линиями, чтобы блокировать свет, созданный точными методами фотолитографии. В датчиках положения с низким разрешением используются металлические диски со штампованными или протравленными отверстиями.

Стандартные оптические энкодеры имеют два или более фотодатчиков, смещенных на шаг 1/2 слота, что увеличивает разрешение с помощью технологии, называемой «квадратурное декодирование», которая встроена в большинство микроконтроллеров. Квадратура также позволяет устройству определять направление вращения вала. Квадратурное декодирование не добавляет задержки и обычно включает цифровой фильтр от электрических помех.
Разрешение энкодера обычно указывается изготовителем в строках на оборот или в ppr (импульсов на оборот). Это разрешение необработанных сигналов A и B, которые подаются в квадратурный декодер для определения количества импульсов / оборотов, а количество импульсов / оборотов такое же, как 4X линий / оборот.

Оптические энкодеры обычно имеют разрешение от 128 до 20000 импульсов / оборот. Некоторые улучшенные модели имеют более высокое разрешение. Средняя точность составляет ± 0,1 градуса.
Когда энкодеры любого типа используются в качестве устройств обратной связи в электроприводах на основе шагового двигателя, разрешение является важным, поскольку большое число полюсов шагового двигателя приводит к короткому электрическому циклу. Например, шаговый двигатель на 1,8 град. имеет 50 электрических циклов на один механический оборот, а разница между полным крутящим моментом и отсутствием крутящего момента составляет 1,8 градуса. 4 000 импульсов / оборот обеспечивает 20 дискретных отсчетов свыше 1,8 град., которого достаточно, чтобы сделать возможным обнаружение сваливания, предотвращение сваливания и поддержания текущего положения. Для сервопривода в режиме реального времени 20 000 импульсов на оборот — гораздо лучший выбор.
При применении к трехфазным бесколлекторным (бесщеточным) двигателям датчики часто включают в себя три дополнительных коммутационных сигнала (названных U, V и W), которые сообщают драйверу, когда следует переключать ток в обмотках статора.

Оптические энкодеры выдают мгновенный сигнал без задержки, поэтому вал электрической машины реально находится там, где сигнализирует датчик положения. Время задержки важно при использовании датчика для измерения скорости и для сервоуправления в реальном времени.
Магнитные энкодеры

Магнитные энкодеры стоят намного дешевле оптических и более компактны. Большинство из них используют аналоговые устройства на основе эффекта Холла, установленные на печатной плате. Датчики Холла приводятся в действие двухполюсным магнитом, установленным на конце вала. Датчики Холла выдают два сигнала переменного тока в противофазе с одним циклом на оборот вала. Эти сигналы интерполируются для создания 65 536 отсчетов на оборот. Однако эта интерполяция подвержена множеству ошибок, таких как электрические шумы в схемах, несовершенное намагничивание, биение вала, а также радиальное и осевое смещение магнита. Большинство магнитных энкодеров включают различные способы калибровки для компенсации как можно большего количества ошибок.

Поскольку магнитные энкодеры имеют один цикл на оборот вала, они, по сути, измеряют абсолютное положение в пределах одного оборота вала.
Магнитным энкодерам всегда нужно время для интерполяции сигналов. Ранние магнитные энкодеры имели переменную (недетерминированную) задержку преобразования, что делало их непригодными для отслеживания скорости и положения в реальном времени на машинах с большим числом полюсов, таких как шаговые двигатели. Новые, более современные модели, имеют предсказуемые задержки преобразования. Зная это, центральный процессор может автоматически корректировать показания положения и скорости для компенсации задержки.
Сравнение оптических и магнитных энкодеров

Первый энкодер — это широко используемая ранняя 12-битная модель, которая зарекомендовала себя как надежная, недорогая и достаточно точная. Он включает квадратурный интерфейс ABZ, обеспечивающий 4096 импульсов на оборот, что упрощает работу с модулями интерфейса квадратурного энкодера (QEI), которые используются в микроконтроллерах и процессорах цифровых сигналов.
12-битный энкодер был сочтен неподходящим для некоторых приложений, потому что его низкое разрешение не дает достаточно информации для правильного регулирования скорости на низких скоростях.

Второй — 16-битный магнитный энкодер, использующий датчики Холла. Разрешение намного выше, чем у 12-битной модели (65 536 импульсов на оборот против 4096), но ее точность заметно хуже. Это связано с несколькими факторами. Во-первых, методика калибровки производителя не дает достаточно малой погрешности. Во-вторых, его интерполяция сигналов эффекта Холла по своей природе неточна. И в-третьих, отношение сигнал / шум заставляет счетчик изменяться по крайней мере на два бита, даже когда он не движется, что может создавать дизеринг и производный шум в сервоконтуре. При оценке такого типа датчика важно учитывать разрешение и точность. Никогда не основывайтесь на гипотезе — чем выше разрешение, тем выше точность.

В третьем магнитном энкодере используется магниторезистивная технология, которая по своей природе более точна и менее чувствительна к внешним воздействиям, чем модели с эффектом Холла. Внешние магнитные поля, в том числе поля самого двигателя, могут влиять на работу магнитных энкодеров.
Данный тип датчика предлагает выбор интерфейса ABZ или SPI (высокоскоростной синхронный последовательный). Интерфейс SPI является обычным для DSP и микроконтроллеров и предпочтительнее ABZ. Но использование SPI предотвращает отправку квадратурного сигнала ABZ на другое устройство (например, контроллер движения), поскольку два интерфейса используют одни и те же выводы интегральной микросхемы.
Емкостные энкодеры

Емкостные энкодеры измеряют положение, отслеживая изменение емкости в цепи при вращении вала двигателя. Они невосприимчивы к внешним магнитным полям, а также к пыли и мусору. Емкостные энкодеры имеют разрешение до 16 384 импульсов / оборот (14 бит) и точность ±0,2 градуса.
Емкостные энкодеры выдают стандартный квадратурный сигнал AB, подходящий для использования в реальном времени с большинством микроконтроллеров и большинством стандартных драйверов, которые включают опцию обратной связи энкодера.

Емкостные энкодеры более устойчивы к электромагнитным помехам, чем магнитные энкодеры, и допускают большее загрязнение, чем оптические.
Многооборотные энкодеры
Многооборотные энкодеры полезны для отслеживания положения вала при выключенном контроллере или электроприводе. Например, если предприятие или технические специалисты не хотят возвращать систему в исходное состояние при каждом включении, необходимы абсолютные многооборотные энкодеры. (Если необходимо отслеживать положение только при включенном драйвере, драйвер отслеживает положение, и абсолютный многооборотный энкодер не нужен.)
Есть три распространенных типа:
Многооборотные энкодеры с питанием от батареи используют батарею, чтобы поддерживать в рабочем состоянии необходимые электрические схемы во время отключения питания для отслеживания положение энкодера через несколько оборотов. Обратной стороной является то, что информация о местоположении будет потеряна, когда батарея разрядится. Резервный аккумулятор может значительно увеличить габариты датчика положения.

Энкодеры с редуктором используют вторичный энкодер, который перемещается на один или несколько отсчетов каждый раз, когда первичный энкодер совершает один оборот. Энкодеры с редуктором не требуют батареи, но являются сложными и дорогостоящими, а шестерни могут со временем изнашиваться.
Энкодеры с накоплением энергии Wiegand используют эффект Виганда, чтобы генерировать электрический импульс каждый раз, когда датчик завершает оборот. Эта энергия постоянна независимо от того, насколько медленно вал вращается, когда он проходит магнитный переход, поэтому этот импульс можно надежно использовать для питания небольшой цепи и подсчета оборотов.

В датчиках положения на основе эффекта Виганда используется первичный магнитный энкодер, обеспечивающий 131072 отсчета на оборот (также называемый 17-битным, потому что 217 = 131 072). Счетчик оборотов — 16 бит, поэтому он может отслеживать 216 = 65 536 оборотов вала. Точность ± 0,1 град.

Интерфейс для энкодеров Weigand часто BISS-C. Некоторые микроконтроллеры имеют собственный интерфейс BISS-C, поэтому для преобразования сигнала используется внешнее устройство FPGA.
Энкодеры широко используются в приложениях управления движением с обратной связью. Выбор лучшего датчика положения для вашего приложения требует опыта, который часто можно найти у поставщиков.

Эффект Виганда
Эффект Виганда — это нелинейный магнитный эффект, названный в честь его первооткрывателя Джона Р. Виганда. Данное явление происходит в специально отожженной и закаленной проволоке, называемой проволокой Виганда.
Проволока Виганда изготавливается из низкоуглеродистого викаллоя, ферромагнитного сплава кобальта, железа и ванадия. Вначале проволока отжигается. Она притягивается к магнитам, и силовые линии магнитного поля «втягиваются» в провод. Но проволока сохраняет лишь очень небольшое остаточное магнитное поле, когда внешнее поле снимается.
Затем проволоку скручивают и раскручивают для холодной обработки внешней оболочки, пока сердечник остается мягким. Затем проволока выдерживается. Это делает магнитную коэрцитивную силу внешней оболочки намного выше, чем у внутреннего сердечника. Высокая коэрцитивность оболочки позволяет ей сохранять внешнее магнитное поле, даже когда первоначальный источник поля удален.
Теперь на проводе будет наблюдаться большой магнитный гистерезис: если к проводу поднести магнит, внешняя оболочка с высокой коэрцитивной силой удерживает магнитное поле от внутреннего мягкого сердечника. Но если магнитное поле превышает заданный порог, весь провод — как внешняя оболочка, так и внутренний сердечник — быстро меняет полярность намагничивания. Это переключение (эффект Виганда) происходит за несколько микросекунд.