Роботы-пылесосы с лидаром. Что такое лидар и зачем он нужен?
Лазерная навигация помогает роботу-пылесосу ориентироваться в помещениях со сложной планировкой и методично обрабатывать каждый участок пола, что положительно отражается на качестве уборки. Поэтому каждый уважающий себя производитель добавил в свою линейку модель с лидаром. За редким исключением, это роботы-пылесосы среднего и высокого класса. В рейтинге представлено 10 моделей с лазерной навигацией, различающихся по ценнику (от 20 до 50 тыс. руб.), техническим характеристикам и функциональным возможностям.
Что такое лидар?
Лидар (от англ. Light Detection and Ranging) или лазерный дальномер работает по тому же принципу, что и радар, но вместо радиоволн он использует световые волны. Вращаясь внутри башенки с прорезями, лидар зондирует пространство в горизонтальной плоскости на 360 градусов вокруг робота. Он посылает лазерный импульс и высчитывает время, затраченное на то, чтобы луч достиг объекта и отразился обратно, на основе чего и определяется расстояние до объекта. Полученные данные обрабатываются процессором, который строит систему координат окружающих объектов и на её основе рисует в приложении трёхмерную карту помещения.
Главное преимущество лидара – высокая точность измерений и независимость от освещённости объекта. Лазерный дальномер одинаково эффективно работает днём и ночью, на открытом пространстве и под мебелью. К недостаткам лазерной навигации можно отнести проблемы с распознаванием отражающих и прозрачных поверхностей (зеркала, стёкла, тюлевые занавески, хромированные ножки мебели и т. п.), а также быстрый износ подшипника вращающего механизма.
Roborock S6 MaxV

Roborock S6 MaxV – потенциальный новый флагман Xiaomi с инновационной системой навигации ReactiveAI, представленной тандемом лидара и стереоскопической камеры. За счёт этой системы робот распознаёт встречающиеся препятствия и определяет оптимальный алгоритм их обработки (обувь, собачьи миски и экскременты – объезжать, ножки стула – обработать вплотную и т. д.). Силы всасывания в 2500 Па хватает для сбора шерсти, песка и камней с ковров, со средним ворсом. А также в наличии продвинутая система влажной уборки с баком для воды и моющей шваброй, как у DEEBOT Ozmo 950. На одном заряде аккумулятора (5200 мАч) робот успевает обработать до 250 кв. м., после чего становится на подзарядку или возобновляет уборку. В продаже Roborock S6 MaxV должен появиться осенью 2020 с ориентировочным ценником в 750$.
GENIO LASER L800

Флагман GENIO – одна из самых сбалансированных моделей предыдущего поколения. В помощь лидару производитель укомплектовал робота гироскопом, подпружиненным бампером, ИК-сенсорами и боковым датчиком. Последний позволяет GENIO LASER L800 двигаться параллельно стене без постоянных «киваний» в сторону плинтуса. Интерактивность приложения на том же уровне, что и у более дорогого Roborock S6 MaxV. В процессе сухой уборки робот собирает шерсть турбощёткой и втягивает мусор в пылесборник объёмом 500 мл. Многоуровневая система фильтрации не позволяет вылетать наружу даже самым мелким пылинкам. Сила всасывания достигает 2700 Па. Аккумулятор соответствует мощности мотора – 5200 мАч. Для влажной уборки GENIO LASER L800 укомплектован отдельным модулем с баком на 240 мл и отсеком для мусора.
Proscenic M7 Pro

Робот-пылесос M7 Pro от бренда Proscenic обошёл многих именитых конкурентов и занял почётное второе место рейтинга. Не поднимая стоимость выше 45 тыс. руб., производитель укомплектовал M7 Pro мощным мотором на 2700 Па, топовым аккумулятором на 5200 мАч, зарядной базой и станцией самоочистки. По мере заполняемости пылесборника робот самостоятельно перекачивает собранный мусор в большой стационарный бункер, что максимально экономит время потребителю. Достаточно один раз поставить программу и раз в две недели менять одноразовые пакеты. С умными функциями у Proscenic M7 Pro тоже всё в порядке: Y-образная протирка пола, как в Okami U100, распознавание коврового покрытия, индивидуальная программа уборки для каждой комнаты и управление через голосовых помощников. Единственный недостаток – маленький резервуар для влажной уборки (110 мл).
Viomi V3

Ещё один робот с интерактивной картографией на базе лидара – можно делить квартиру на комнаты, очерчивать прямоугольные зоны, ставить запретные линии. Но главная особенность Viomi V3 – его богатая комплектация. Производитель предусмотрел отдельный модуль для каждого рабочего режима:
Аккумулятора ёмкостью 4900 мАч хватает на 170 минут автономной работы. Во время обработки ковров шум достигает 75 дБ.
Roborock S6 Pure

Обновленная версия Roborock S6 с пометкой Pure может похвастать доступным ценником при сохранении функционала исходной модели, и даже увеличенным баком для воды (180 мл). Единственный серьезный недостаток удешевления – отказ от фирменной шумоизоляции, из-за чего гул мотора достигает 75 дБ. Для навигации робота оборудовали хорошо узнаваемым Xiaomi-шным лидаром с оранжевыми прорезями. Через них он сканирует окружающее пространство на 360о и составляет интерактивную карту. В наличии плавающая турбощетка, надежная силиконовая метелка и бесщеточный мотор на 2000 Па. При обнаружении ковров Roborock автоматически повышает обороты, чтобы собрать больше грязи. Гладкие покрытия робот может не только пылесосить, но ещё протирать. Для этого под его днище крепится швабра с салфеткой. Вода подается прямотоком, поэтому без присмотра оставлять робота нельзя. Аккумулятор такой же, как у флагманских моделей Roborock, – 5200 мАч.
Eufy RoboVac L70 Hybrid

Шестое место занимает ещё одна качественная копия Roborock S6 – модель RoboVac L70 Hybrid от компании Eufy by Anker. По силе всасывания этот американский робот сопоставим с Lenovo X1 (2200 Па) и работает он почти так же тихо (не громче 57 дБ), но в отличие от китайского собрата, он умеет автоматически повышать обороты турбины при заезде на ковры (carpet boost). Другая положительная особенность RoboVac L70 Hybrid – качественная влажная уборка. Под лицевую крышку вставляется двухэтажный пылесборник, верхнюю часть которого занимает бак для воды. Из резервура вода поступает на салфетку под контролем электронасоса. А также в наличии подкладка под док-станцию, защищающая пол от протечек во время простоя робота. Аккумулятор у RoboVac L70 – один из лучших на рынке (литий-ионный на 5200 мАч). Но покупателю этот пылесос обойдётся на 20% дороже, чем Botvac D7 Connected, – 35 тыс. руб.
360 S6 Pro/S9

360 S6 Pro – это единственный робот в рейтинге, который вместо традиционных ИК-датчиков укомплектован УЗ-сенсорами, распознающими препятствия независимо от их цвета и прозрачности. Такое дополнение к лидару значительно повышает эффективность работы пылесоса ночью. Роботизированный помощник запоминает до 10 карт помещения, благодаря чему его удобно использовать в многоэтажных помещениях. Ещё одно достоинство 360 S6 Pro – батарея ёмкостью 5200 мАч, на заряде которой робот может безостановочно пылесосить в течение 3-часов. Для влажной уборки служит отдельный бак для воды, который вставляется под лицевую крышку рядом с пылесборником – самая удобная для обслуживания конструкция. Единственный минус этой модели – слабая звукоизоляция корпуса. Мотор у 360 S6 Pro такой же, как RoboVac L70 Hybrid (2200 Па), но шумит он гораздо сильнее – до 70 дБ.
iBoto Smart L920W Aqua

Робот вышедший вначале 2020 года от компании iBoto. При стоимости в 21-24 тыс. руб. Smart L920W Aqua может похвастать лазерной навигацией с картографией и делением помещения на небольшие участки, каждый из которых обрабатывается отдельно. Робот пылесосит пол и вытирает его влажной тряпкой, но из-за особенностей конструкции выполняет эти операции раздельно. Сухая уборка выполняется при помощи вакуумного мотора в 2000 Па, центральной и торцевых щёток. Для влажной протирки предназначен отдельный резервуар на 300 мл c электромагнитным дозатором. Из достоинств Smart L920W Aqua следует выделить небольшую высоту корпуса (80 мм с учётом лидара), которая позволяет iBoto проникать под диваны, кровати и в другие труднодоступные места. Наряду с автоматическим режимом, производитель сохранил на выбор пользователя удобные классические режимы – по спирали и вдоль стен.
NEATSVOR X600

Обладатели ковров со средним ворсом впервые могут почувствовать себя уверенно. Силы всасывания в 4000 Па хватит для втягивания в пылесборник шерсти, песка, застрявших в ворсинках крошек и любого другого мусора. Контактная обработка покрытия выполняется при помощи трёх щеток – двух боковых и одной центральной. Помимо глубокой очистки ковров, NEATSVOR X600 может делать и влажную уборку. Для этого в отсек под крышку нужно вставить совмещенный контейнер с баком на 350 мл и отсеком для пыли. Вакуумный мотор во время протирки отключается, но турбощетка продолжает забрасывать соринки в воздуховод. Обильность смачивания салфетки переключается в приложении. Планирование маршрута осуществляется посредством SLAM-навигации: NEATSVOR сканирует помещение лидаром, пылесосит и рисует карту одновременно. В интерактивные возможности входит деление карты на комнаты, установка целевых и запретных зон.
Alfawise V10 Max

Один из удачных клонов Xiaomi Mijia LDS, мало чем уступающий прародителю, а в чем-то и превосходящий его. В частности, Alfawise V10 Max укомплектовали не одной, а двумя торцевыми щетками, из-за чего эффективность уборки за один проход значительно возросла. А ещё производитель предусмотрел сменные рабочие блоки для разных поверхностей: блок прямого всасывания для линолеума и турбощетку для ковров. При заезде на ворсистые покрытия Alfawise автоматически повышает силу всасывания до 2200 Па. Для активации влажной уборки на место пылесборника нужно вставить бак для воды объемом 400 мл. Смачивание салфетки происходит через вмонтированные в днище форсунки. За картографию помещения отвечает тандем лидара и гироскопа. Пользователь может зонировать помещения и настраивать параметры уборки для индивидуально для каждой комнаты. Заряда аккумулятора в 4300 мАч хватает на обработку 130 кв.м.
Об авторе
Группа в ВК — vk.com/bestrobotinfo — пишите, бесплатно помогаю с выбором роботов пылесосов, консультирую.
О себе: 8 лет работал промоутером Mvideo. Большую часть времени представлял бренд Bork. Работал и с другими брендами. Интересуюсь техникой, в данный момент погрузился с головой в нишу роботов пылесосов, умного дома и все что с этим связано. Пишу обзоры, помогаю людям с выбором. Тестировал лично с десяток моделей роботов. Пишите, если есть вопросы по выбору робота пылесоса, умных розеток. Разбираюсь и в других гаджетах, но не так плотно.
Сравнение навигации роботов-пылесосов: лидар против камеры



Приветствую всех читателей сайта Роботобзор! В пределах этой статьи мы сравним два самых точных типа навигации роботов-пылесосов: на базе лидара и на базе камеры. Такой навигацией оснащены в большей степени модели среднего и премиального ценового сегмента. Это связано с высокой стоимостью самих датчиков. Некоторые бренды используют исключительно камеру в своих флагманских моделях, а некоторые исключительно лидар. Сейчас мы как раз и проведем сравнение, испытав навигационную систему топовых iRobot Roomba i7+ и Roborock S5 Max. Итак, давайте же разберемся, что лучше: лидар или камера для навигации.
Кратко о навигации
Для начала вкратце рассмотрим, что собой представляет точная навигация на базе лидара и камеры, и какие особенности у этих двух систем.
Лидар в роботах-пылесосах устанавливается сверху на корпусе. Он представляет собой некую «башенку» с вращающимся лазерным дальномером внутри. Или как его еще называют, LDS датчик.

Этот лазерный дальномер вращается на 360 градусов с высокой скоростью, сканируя объекты вокруг себя, рассчитывая расстояние до них и выстраивая точную карту помещения.

Робот-пылесос с лидаром
Особенности лидара – это одинаковая точность навигации при любом уровне освещения, т.е. как днем, так и ночью. Кроме этого технология лазерного сканирования более точная. К недостаткам относят более частый выход из строя лидара из-за наличия вращающегося механизма, а также проблемы со сканированием зеркальных покрытий. Это могут быть зеркальные дверцы шкафов в комнате или хромированные ножки стульев. Кроме этого чаще всего роботы-пылесосы с лидаром по высоте достигают 10 см из-за этой самой башенки сверху, а соответственно проходимость роботов под мебелью уступает плоским моделям.
В свою очередь камера представляет собой визуальную систему навигации. Карта помещения строится за счет считывания и обработки изображений с камеры. Она сканирует потолок, делая множество изображений, и на основании этих данных строит план комнат.

Навигация на базе камеры более надежна в плане долговечности самой этой камеры и немного ниже по себестоимости. Кроме этого, камера не увеличивает высоту робота-пылесоса и есть модели, высотой всего около 7-8 см, что позволяет роботу проходить под низкой мебелью.

Навигация по камере
Недостатки визуальной навигации: при плохом уровне освещении или в слабоосвещенных местах камера простыми словами «слепнет». Да и точность визуальной навигации в любом случае уступает лазерному сканированию. Особенно, если потолок без ключевых визуальных меток, по которым и ориентируется робот.
Далее мы в одинаковых реальных условиях сравним лидар и камеру и посмотрим, с каким типом навигации роботы-пылесосы лучше выполняют свою работу.
Сравнение №1 – Ознакомительный проезд


Для того, чтобы максимально объективно протестировать навигацию роботов, мы создали несколько препятствий в тестовой комнате, а именно:
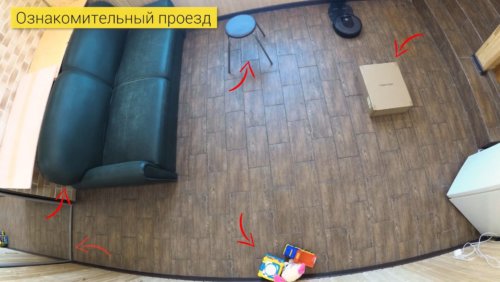
Препятствия в комнате
Сам тест показан на видео, рекомендуем его посмотреть:
В итоге получилось, что:
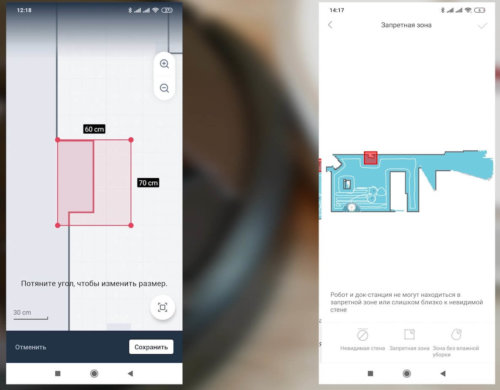
Сравнение №2 – Передвижение при сохраненной карте
Теперь посмотрим, насколько изменится алгоритм передвижения роботов после того, как они построили карту помещения и сохранили ее в памяти. Дополнительно открылась возможность устанавливать запретные зоны на карте, мы добавим по одной зоне, проверив как роботы на них реагируют. Наглядно все показано на видео (выше).
iRobot Roomba i7+ убирает змейкой зону за зоной. Вокруг ножек стульев он не убрал, в темной области проблем с навигацией не было, запретную зону распознал и не заехал в нее. На уборку в один проход потребовалось около 12 минут.
Что касается Roborock S5 Max, алгоритм движения поменялся. Робот первым делом проехал всю доступную площадь по периметру, а потом начал убирать продольной змейкой за один проход. Он убрал вокруг всех ножек стула, практически не касался препятствий и обходил стороной запретную зону. Еще одно наблюдение – iRobot Roomba i7+ за диваном проехал только туда и обратно, а Roborock S5 Max смог сделать два прохода туда и обратно в пределах этой же ширины зоны, т.е. он более тщательно убрал в узкой области. После этого робот пошел на второй проход всей доступной площади и вернулся на базу. Потратил чуть больше 18 минут, но опять-таки, покрыл бОльшую доступную площадь.
Передвижение робота при сохраненной карте
Сравнение №3 – Ориентация в многокомнатном помещении


Ну и последнее, что хотелось бы сравнить – как роботы-пылесосы на базе лидара и камеры строят карту всего дома и за сколько времени они убирают эту площадь. В нашем случае это 5 комнат общей площадью около 40 кв.м. Полезная площадь уборки около 35 к.в.м
Камера Айробота вычислила 27 кв.м, хотя по факту около 35 квадратов. Однако точность построения высокая, геометрия совпадает с реальной обстановкой в доме. Эту площадь робот в один проход убирает примерно за 50-55 минут, останавливаясь на особо загрязненных участках, которые сам определяет оптическим датчиком.
Лидар у Roborock построил такую же по геометрии комнату, при этом площадь вычислил более точно, 34 кв.м. что практически соответствует реальной. Кроме этого на уборку всей доступной площади ему понадобилось всего 31 минута, что значительно быстрее.
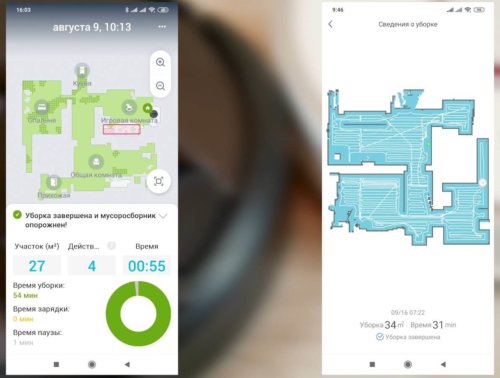
Ориентация роботов в многокомнатном помещении
В итоге можно сказать, что лидар точнее строит карту и позволяет быстрее пройти всю доступную площадь, если комнат несколько. При этом робот с лидаром в нашем случае тщательнее прошел в проблематичных местах, таких как область между ножками стула и узкий затемненный участок за диваном. И контакт с предметами у роботов с лидаром более мягкий, они реже ударяются бампером.
Кстати, важно заметить, что после нескольких проездов роботом с камерой, особенно если вы его будете включать в разное время суток при разном уровне освещения в комнатах, схема передвижения выработается автоматически и даже ночью робот сможет проезжать всю доступную площадь, не оставляя не убранных зон. Так что именно iRobot Roomba i7+ может столкнуться с проблемой в навигации в слабоосвещенных местах только при ознакомительном проезде. В дальнейшем эта проблема исчезает.
Подводим итог
В завершении выделим особенности роботов-пылесосов с точной навигацией на базе лидара и камеры.
В любом случае и тот, и другой тип навигации позволяет построить точную карту помещения и вывести уборку роботом на максимально эффективный уровень. Сравниваемые роботы могут сохранять несколько разных карт уборки в памяти, что актуально для двухэтажных домов, кроме этого поддерживается уборка после дозарядки, зонирование помещение на комнаты для покомнатной уборки по графику, а также возможность установки запретных зон и зон уборки на карте.
При этом всем лидар строит карту точнее, поэтому убирает быстрее и оставляет минимум пропущенных зон. Как вы убедились, критической проблемы при работе с зеркалом нет. В любом случае есть способы избежать построения карты с погрешностью, например, наклеить на зеркале на уровне лидара какую-нибудь защитную пленку, которая не будет отражать невидимые глазу инфракрасные лучи датчика.
Что касается долговечности самого лазерного дальномера, качественные роботы, те же Roborock, оснащены надежным лидаром, поэтому и прослужит такой робот долго. А вот за китайские неизвестные роботы никто не отвечает и в этом случае есть шанс, что навигация может выйти из строя быстрее. Ну и не забываем про высоту, тонких роботов с лидаром не бывает, поэтому это, наверное, единственный весомый минус, который может быть.
Камера слегка уступает точностью построения карты, особенно это чувствуется на больших площадях от 100 кв.м. и выше. Да и скорость уборки ниже у таких роботов. Но зато камера реже выходит из строя и не ворует высоту робота. А проблемы с ориентацией при слабом освещении могут наблюдаться либо при ознакомительном проходе, либо в тех моделях, у которых камера больше выступает муляжом, чем реальным органом навигации.
Так что я бы сказал, что роботы-пылесосы с лидаром лучше в плане навигации, но не настолько, чтобы вовсе не рассматривать модели с камерой. Все индивидуально и большей мере зависит от самого выбранного робота-пылесоса.
В любом случае, в 2020 году, самый лучший тип навигации, это установленные лидар и камера одновременно. Сравнение лидара и лидара+камеры вы можете увидеть на нашем видео:
Как работают сенсоры роботов-пылесосов


Содержание
Содержание
Наблюдение за работой робота-пылесоса — довольно медитативное и умиротворяющее занятие. Но время от времени у пытливых умов появляется вопрос: «Как роботу удается ориентироваться в пространстве и преодолевать возникающие на его пути препятствия?» Давайте разбираться!
Несмотря на огромное количество мифов о работе робота-пылесоса, этот девайс по праву занимает свое место в наших домах, а все благодаря той легкости и скорости, с которой он выполняет уборку. Его эффективность во многом зависит от количества и типа электронных сенсоров, установленных на борту. В зависимости от модели, робот-пылесос использует от 6 до 15 датчиков, включенных в различные системы.
Назначение датчиков — построение карты объекта, ориентирование в пространстве и обеспечение безопасности девайса. Данные, получаемые с сенсоров, обрабатывает управляющая программа. Ориентируясь на полученные значения параметров, применяются те или иные сценарии, непосредственно влияющие на действия робота-уборщика.
Только слаженная работа всех систем обеспечивает работу пылесоса.
Система позиционирования
Основная система любого робота-пылесоса, отвечающая за построение карты убираемой территории и определение точного местоположения электронного уборщика внутри помещения.

В основе работы системы лежит метод SLAM (Simultaneous Localization And Mapping), основная идея которого — построение ситуационной карты и локализация объекта в пространстве. Это происходит следующим образом. Сканер, установленный на объекте, проверяет пространство вокруг и по отклику своих датчиков составляет карту местности.
В сегмент бытовой техники изобретение пришло из области освоения космоса и близлежащих планет: одними из первых такие радары (точнее, лидары) получили луноходы и марсоходы.
В роботах-пылесосах построение карты необходимо для определения оптимального алгоритма уборки. После составления карты управляющая программа разрабатывает и отдает на исполнение оптимальный маршрут передвижения робота. Мобильный пылесос должен заглянуть даже в самый отдаленный уголок!
В современных роботах-пылесосах построение карты окружающего пространства производят одним из двух типов датчиков.
Лазерное сканирование пространства
Сканирование пространства происходит с помощью лидара (или, как его еще называют, LDS-датчика) — прибора, применяемого для точных измерений в газообразной среде. Распознать LDS-датчик достаточно просто: он представляет собой небольшой выступ в форме шайбы, расположенный на верхней плоскости девайса. Датчик содержит источник и приемник лазерного или светового луча (в маломощных девайсах применяют светодиоды, излучающие потоки света в инфракрасном диапазоне). Для обеспечения кругового обзора LDS-сенсор вращается вокруг своей оси с довольно высокой частотой.

Испускаемый световой луч, встречаясь с препятствиями на своем пути (стены, крупная мебель и т. д.), отражается от них и улавливается приемником лидара. Расстояние до препятствия вычисляется по временной задержке между генерацией и приемом лазерного луча. В большинстве моделей роботов-пылесосов частота вращения датчика, как правило, составляет 5 об/сек, чего вполне достаточно для построения карты и довольно точного вычисления положения пылесоса в помещении.

Работающие по такому же принципу датчики можно встретить и на прототипах беспилотных автомобилей.

LDS-датчик позволяет достаточно точно определять расстояние до стен, крупных предметов и других препятствий. Как правило, в роботах-пылесосах применяются датчики, позволяющие уверенно сканировать пространство на расстоянии до 6 метров.
Основным недостатком такой конструкции является то, что датчик выступает над уровнем верхней плоскости, и добавляет к высоте робота-пылесоса несколько сантиметров. В некоторых случаях это может быть критично, поскольку пылесос просто физически не сможет заехать под низко расположенную полку или пространство под кроватью или шкафом.
Визуальная система навигации
Другим способом навигации является так называемая безлидарная система, основанная на широкоугольной камере.

Вот только камера применяется особая, позволяющая создавать объемные снимки пространства. Иначе такие камеры называют «камерами глубины» или ToF-камерами (Time of Flight, что в буквальном переводе означает «время полета»).
ToF-камеры — новое веяние в сфере мобильных гаджетов. Ими оснащены многие флагманские смартфоны. С помощью такой камеры легко и довольно недорого реализуется механизм распознавания по лицу, обмануть его фотографией человека невозможно.
ToF-камера представляет собой источник света, излучающий в инфракрасном спектре, и светочувствительную матрицу, улавливающую интенсивность отраженного света. Их принцип действия схож с лазерным определением расстояния. Камера рассчитывает время с момента испускания пучка света до момента его фиксации на светочувствительной матрице, вычисляет расстояние до объекта в соответствии с временной задержкой и составляет объемную карту помещения.

Преимуществ у такого метода несколько. Во-первых, уровень освещения не играет определяющей роли. Даже в полумраке сенсору по силам «отрисовать» границы убираемого пространства. Во-вторых, камеру встраивают вровень с верхней поверхностью робота, что позволяет сделать его более компактным, и, следовательно, открыть ему дорогу в труднодоступные места.
Система ориентирования в пространстве
Задача системы ориентирования — минимизация столкновений с препятствиями, возникающими на пути робота-пылесоса.
В отличие от системы позиционирования, сканирующей пространство вокруг пылесоса на несколько метров, датчики ориентирования способны выявить препятствие в пределах одного метра. Как правило, для выявления преград используют датчики двух типов: ультразвуковые и инфракрасные.

Принцип их действия схож. В обеих конструкциях имеются передатчик и приемник сигнала. В качестве самого сигнала используют либо звуковые волны, неслышимые человеческому уху (частотой свыше 20 кГц), или световые лучи инфракрасного диапазона.
При обнаружении препятствий, управляющая программа вносит корректировку в траекторию движения робота-пылесоса и уводит его в сторону.

Ведущую роль в системе играет ультразвуковой датчик. Он располагается в передней части устройства.
Инфракрасные сенсоры располагают на боковых поверхностях робота по его периметру. Они дополняют основной датчик, обеспечивая пылесосу возможность кругового отслеживания препятствий.

Боковые датчики выполняют еще одну функцию. Они обеспечивают движение робота вдоль стены, когда нужно убрать по периметру помещения. Как правило, сенсоры позволяют выдерживать интервал от стены на уровне 10-15 мм. Этого вполне достаточно для уборки мусора подвижными щетками робота-пылесоса.
В случае, когда препятствие не попало в зону действия ни одного из перечисленных датчиков и столкновение с поверхностью все же произошло, в работу вступает третья группа датчиков, установленная в подвижном бампере робота-пылесоса, — датчики касания. При срабатывании они посылают сигнал в центральный процессор, а тот в свою очередь оперативно корректирует траекторию движения робота. Датчики касания выполнены либо в виде обычных концевых выключателей, либо в формате оптопары, в которой световой луч прерывается подвижным «флажком» в момент нажатия на передний бампер.

Система безопасности
Система безопасности предназначена для защиты робота-пылесоса от падений и неправильного его использования со стороны пользователя.
Защиту от падения с высоты обеспечивает группа датчиков, установленная в нижней части по периметру устройства.

Это уже привычные инфракрасные сенсоры, с тем же принципом действия, но вот логика их работы существенно отличается. Датчик постоянно отслеживает наличие твердой поверхности под колесами робота-пылесоса. Как только она пропадает (робот подъехал к краю ступени или пытается съехать с высокого порожка), центральный процессор получает тревожный сигнал с датчика и изменяет траекторию движения робота-уборщика.

Сочетание светлых и темных цветовых схем напольного покрытия может вызвать ложные срабатывания оптических датчиков высоты, вследствие чего робот просто откажется проводить уборку темных зон.
В мотор-редукторах, приводящих в движение колеса пылесоса, установлены датчики опрокидывания робота. Если одно или оба колеса окажутся вывешенными, срабатывание датчиков приведет к остановке моторов. Это убережет аккумуляторную батарею от разрядки. Возобновление работы возможно только после установки робота-пылесоса на ровную поверхность.
Датчик опрокидывания — обычный концевой выключатель, разрывающий цепь питания при опрокидывании пылесоса или вывешивании одного из колес.

Чтобы не допустить использование робота-пылесоса без контейнера для сбора мусора, в приемный лоток устанавливают датчик наличия контейнера. Вариаций исполнения не так уж и много. Самый простой — установка концевого выключателя, более продвинутый — датчик в виде геркона. На корпусе контейнера устанавливают постоянный магнит, активирующий геркон, когда контейнер установлен на свое место. Процессор «видит» замкнутую цепь и «понимает» что устройство можно использовать.
Система парковки на базовую станцию
Возвращение на базовую станцию после уборки или в случае необходимости пополнения заряда аккумулятора, — еще одна интересная функция, реализованная в роботе-пылесосе. При выполнении процедуры возвращения на базовую станцию, задействованы две системы. На первом этапе — система позиционирования, которая отвечает за текущее положение устройства по отношению к базовой станции. Алгоритм определяет кратчайший оптимальный маршрут. Когда робот-пылесос находится в зоне видимости базовой станции, в работу включаются датчики парковки.
Система работает следующим образом. В базовой станции расположен мощный инфракрасный светодиод, выполняющий функцию маяка. В корпусе робота-пылесоса имеется пара оптических приемников, захватывающих луч маяка. Каждый из приемников передает процессору свое значение расстояния до маяка, а тот корректирует маршрут движения таким образом, чтобы оба значения сигналов сравнялись по величине. Как только это происходит, считается, что робот занял позицию прямо перед базой, после чего происходит его парковка на контактных площадках базовой станции.
Как видно, датчики робота-пылесоса превращают его в полностью автономное устройство, способное самостоятельно навести порядок в доме. Получается как в той известной песне Сережи Сыроежкина: «Вкалывают роботы, счастлив человек!». Единственное, за чем необходимо следить, чтобы девайс всегда находился в строю, так это за чистотой самих датчиков.